Direct methods (shooting vs simultaneous)
Contents
Direct methods (shooting vs simultaneous)#
!pip install dynamaxsys==0.0.5
Requirement already satisfied: dynamaxsys==0.0.5 in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (0.0.5)
Requirement already satisfied: jax in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (from dynamaxsys==0.0.5) (0.4.13)
Requirement already satisfied: numpy in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (from dynamaxsys==0.0.5) (1.24.4)
Requirement already satisfied: ml-dtypes>=0.1.0 in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (from jax->dynamaxsys==0.0.5) (0.2.0)
Requirement already satisfied: opt-einsum in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (from jax->dynamaxsys==0.0.5) (3.4.0)
Requirement already satisfied: scipy>=1.7 in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (from jax->dynamaxsys==0.0.5) (1.10.1)
Requirement already satisfied: importlib-metadata>=4.6 in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (from jax->dynamaxsys==0.0.5) (8.5.0)
Requirement already satisfied: zipp>=3.20 in /usr/share/miniconda/envs/__setup_conda/lib/python3.8/site-packages (from importlib-metadata>=4.6->jax->dynamaxsys==0.0.5) (3.20.2)
import numpy as np
import jax.numpy as jnp
import cvxpy as cp
import matplotlib.pyplot as plt
from dynamaxsys.integrators import DoubleIntegrator2D
from dynamaxsys.base import get_discrete_time_dynamics, get_linearized_dynamics
Define double integrator dynamics#
dynamics = get_discrete_time_dynamics(DoubleIntegrator2D(), dt=0.1)
state0 = jnp.array([0.0, 0.0, 0.0, 0.0])
control0 = jnp.array([0.0, 0.0])
time = 0.1
dynamics = get_linearized_dynamics(dynamics, state0, control0, time)
x0 = np.array([0., 0., 0., 2.]) # initial state
xgoal = np.array([8., 4., 0., -1.]) # goal state
No GPU/TPU found, falling back to CPU. (Set TF_CPP_MIN_LOG_LEVEL=0 and rerun for more info.)
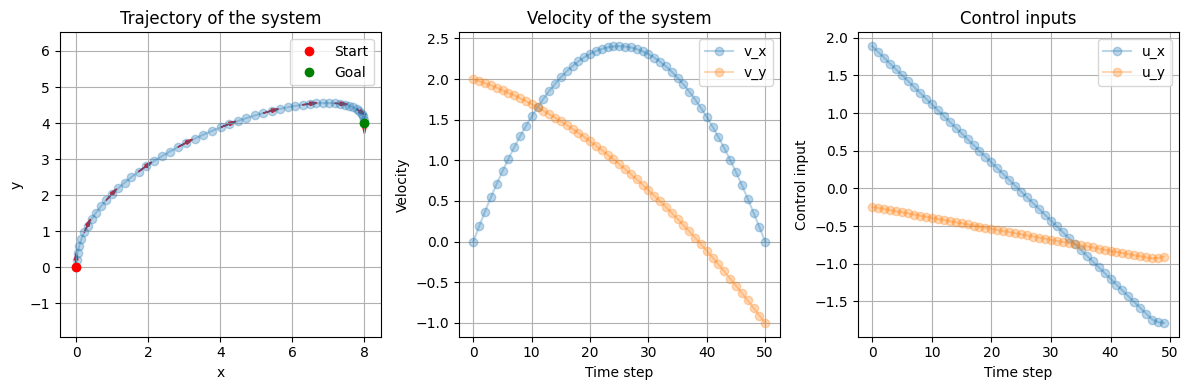
Shooting method#
m = 2 # control input dimension
T = 50 # Number of time steps
us = cp.Variable((m, T)) # control inputs <----- only control inputs are optimized
xs = [x0]
objective = 0
constraints = []
for i in range(T):
u = us[:, i]
objective += cp.sum_squares(u)
# dynamics are not a constraint.
xnext = dynamics(xs[-1], u) # used to get state at time t+1 in order to get xT at the end.
xs.append(xnext)
# Add constraints
constraints.append(cp.norm(u, 2) <= 2)
xT = xs[-1]
# objective += 10*cp.sum_squares(xT - xgoal) # minimize distance to origin
constraints.append(xT == xgoal) # final state constraint
problem = cp.Problem(cp.Minimize(objective), constraints)
problem.solve()
81.6405878373996
%timeit problem.solve()
3.82 ms ± 12.9 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
Need to simulate dynamics using optimized controls
def simulate(x0, us, dynamics):
xs = [x0]
for u in us.T:
xnext = dynamics(xs[-1], u)
xs.append(xnext)
return np.array(xs)
xs = simulate(x0, us.value, dynamics)
plt.figure(figsize=(12, 4))
plt.subplot(1, 3, 1)
plt.plot(xs[:, 0], xs[:, 1], '-o', alpha=0.3)
for i in range(0, len(xs), 5): # Plot velocity vectors every 5 points
plt.arrow(xs[i, 0], xs[i, 1], xs[i, 2] * 0.1, xs[i, 3] * 0.1,
head_width=0.1, head_length=0.2, fc='red', ec='red')
plt.plot(x0[0], x0[1], 'ro', label='Start')
plt.plot(xgoal[0], xgoal[1], 'go', label='Goal')
plt.title('Trajectory of the system')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.xlim(-1, 10)
plt.ylim(-1, 10)
plt.gca().set_aspect('equal', adjustable='box')
plt.axis('equal')
plt.grid()
plt.subplot(1, 3, 2)
plt.plot(xs[:, 2], '-o', alpha=0.3, label='v_x')
plt.plot(xs[:, 3], '-o', alpha=0.3, label='v_y')
plt.title('Velocity of the system')
plt.xlabel('Time step')
plt.ylabel('Velocity')
plt.legend()
# plt.axis('equal')
plt.grid()
plt.subplot(1, 3, 3)
plt.plot(us.value[0, :], '-o', alpha=0.3, label='u_x')
plt.plot(us.value[1, :], '-o', alpha=0.3, label='u_y')
plt.title('Control inputs')
plt.xlabel('Time step')
plt.ylabel('Control input')
plt.legend()
# plt.axis('equal')
plt.grid()
plt.tight_layout()
plt.show()
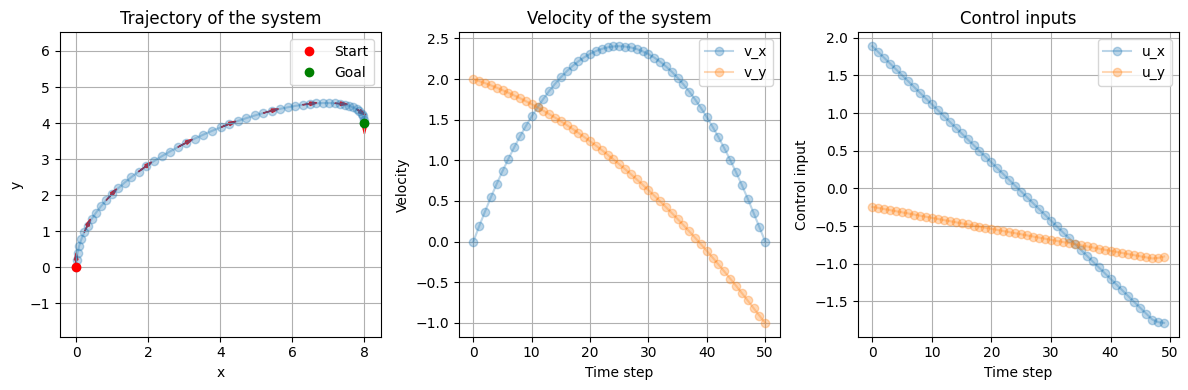
Simultaneous method#
n = 4
m = 2 # control input dimension
T = 50 # Number of time steps
us = cp.Variable((m, T)) # control inputs
xs = cp.Variable((n, T+1)) # states
objective = 0
constraints = [xs[:,0] == x0]
for i in range(T):
u = us[:, i]
objective += cp.sum_squares(u)
# dynamics are treated as constraints. Adding to list of constraints.
constraints.append(xs[:,i+1] == dynamics(xs[:,i], u))
# Add constraints
constraints.append(cp.norm(u, 2) <= 2)
# objective += 10*cp.sum_squares(xs[:,-1] - xgoal) # minimize distance to origin
constraints.append(xs[:,-1] == xgoal) # final state constraint
problem = cp.Problem(cp.Minimize(objective), constraints)
problem.solve()
81.64058783739996
%timeit problem.solve()
5.08 ms ± 29.4 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
plt.figure(figsize=(12, 4))
plt.subplot(1, 3, 1)
plt.plot(xs.value.T[:, 0], xs.value.T[:, 1], '-o', alpha=0.3)
for i in range(0, len(xs.value.T), 5): # Plot velocity vectors every 5 points
plt.arrow(xs.value.T[i, 0], xs.value.T[i, 1], xs.value.T[i, 2] * 0.1, xs.value.T[i, 3] * 0.1,
head_width=0.1, head_length=0.2, fc='red', ec='red')
plt.plot(x0[0], x0[1], 'ro', label='Start')
plt.plot(xgoal[0], xgoal[1], 'go', label='Goal')
plt.title('Trajectory of the system')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.xlim(-1, 10)
plt.ylim(-1, 10)
plt.gca().set_aspect('equal', adjustable='box')
plt.axis('equal')
plt.grid()
plt.subplot(1, 3, 2)
plt.plot(xs.value.T[:, 2], '-o', alpha=0.3, label='v_x')
plt.plot(xs.value.T[:, 3], '-o', alpha=0.3, label='v_y')
plt.title('Velocity of the system')
plt.xlabel('Time step')
plt.ylabel('Velocity')
plt.legend()
# plt.axis('equal')
plt.grid()
plt.subplot(1, 3, 3)
plt.plot(us.value[0, :], '-o', alpha=0.3, label='u_x')
plt.plot(us.value[1, :], '-o', alpha=0.3, label='u_y')
plt.title('Control inputs')
plt.xlabel('Time step')
plt.ylabel('Control input')
plt.legend()
# plt.axis('equal')
plt.grid()
plt.tight_layout()
plt.show()
Questions/comments#
Try solving the problem where the reaching the goal state is treated as a constraint and also try when it is treated as an objective
With the double integrator, the shooting method and simultaneous method were both convex problems (i.e., could be solved using cvxpy). Is this surprising?
Notice that the shooting method ran slightly faster than the simultaneous method, even though the shooting method requires use to simulate the dynamics over the horizon. For this double integrator system, is simulating the dynamics to obtain states an “expensive” process? Why or why not?